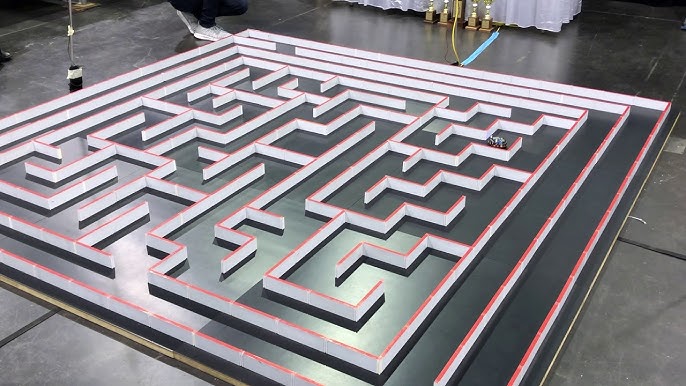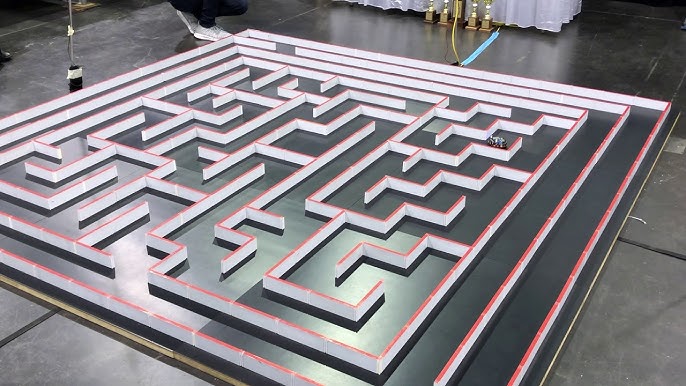
Advanced Micromouse Maze Solving Robot - In Progress
We are developing a fully autonomous micromouse robot designed to explore and solve unknown mazes using real time mapping and shortest path optimization algorithms. This project focuses on embedded systems architecture, real time control, and memory efficient path planning under competition constraints.
The goal is to design a system capable of:
Exploring an unknown maze autonomously
Building an internal grid-based map in real time
Computing the shortest path to the goal
Executing a high-speed optimized run
Software & Embedded Algorithms (In Progress)
The firmware architecture is being designed around a deterministic real-time control loop that integrates sensing, mapping, and motion control. Current development includes:
Grid-based maze representation using memory-efficient data structures
Implementation of a flood-fill–based shortest path algorithm
Dynamic wall detection and map updating during exploration
PID-based motion control for straight-line stability and precise 90° turns
Optimization efforts are focused on reducing control latency, improving turn accuracy, and refining path recomputation logic as new maze data is discovered. Future enhancements include:
Acceleration profiling for high-speed final runs
Motion primitive optimization for smoother cornering
Further control-loop timing refinements
Hardware Architecture
The hardware platform is being designed for:
Fast sensor-to-microcontroller response
Stable PWM-based motor control
Reliable distance sensing for accurate wall detection
Optimized power delivery under acceleration load
Sensor calibration and placement are currently being refined to ensure consistent wall-distance measurement and alignment within maze corridors. The electrical layout is also being optimized to reduce noise interference and maintain signal stability during rapid motion.
This Project is completed under the IEEE MicroMouse Club at California State University Chico
Mechanical System Design
The mechanical structure is being engineered to support:
Compact micromouse competition dimensions
Balanced weight distribution
Low-friction drivetrain
Stable high-speed turning dynamics
Chassis alignment and rigidity are being tested to ensure consistent sensor orientation and repeatable movement accuracy.

In Progress